
En ce moment se déroule la Coupe de Robotique des IUT. Les résultats sont très serrés comme vu avez pu le voir (consultez l’article COMPETITION – Résultats de la journée de qualifications). Nous avons eu l’occasion de discuter pendant quelques minutes avec les membres de l’équipe C3PO pour en savoir plus sur ce concours de robotique.
Qui êtes-vous ?
Bonjour je vous présente l’équipe Thomas, Morgan, Julien et je m’appelle Arthur. Nous sommes quatre membres de l’équipe C3PO actuellement en deuxième année d’étude à l’IUT de Cherbourg.
C’est votre première participation ?
Oui tout à fait. L’équipe change tous les ans. Résultat cette année il a fallu tout refaire. Nous avons tout développé aussi bien l’électronique que la mécanique (même si ce dernier point n’est pas notre spécialité). Nous travaillons toute l’année sur le robot lors des projets réalisés à l’IUT. On peut alors bien prendre en main la machine. De plus nous avons la chance d’avoir une belle piste d’essai mais elle reste plus petite que celle du Festival. Résultat en arrivant on refait des tests sur la piste d’essai pour vérifier que tout marche correctement.
Comment travaillez-vous pendant l’année ?
On a plusieurs cartes qui sont fixées sur un châssis découpé dans du plastique. On avoue pour la mécanique on a eu un peu d’aide. Mais on fait tout maison. On trouve cela nettement plus complet de pouvoir tester toutes les phases de développement que d’utiliser des cartes toute faites. On coupe, on perce, on dessine, on soude et on teste. Parfois ça fonctionne et des fois non. Et donc on recommence, on répare, on change jusqu’à obtenir le bon résultat.
Au final on a eu l’occasion de beaucoup manipuler et d’assimiler énormément de connaissance. On a travaillé en groupe, c’est une belle expérience aussi, et puis le fait de réaliser un projet complet nous a apporté beaucoup de motivation.
Alors comment fonctionne la bête ?
La machine est constituée de plusieurs cartes électroniques qui réalisent chacune une tâche bien spécifique. Il y a une carte pour gérer l’intelligence du robot, une autre pour la puissance moteur, et enfin une troisième avec un capteur servant à détecter la zone d’arrivée. Enfin nous avons intégré un système de balise. On place une petite boite sur la zone d’arrivée qui émet un signal ; celui-ci est analysé par le robot à l’aide d’une petite tourelle rotatif, on enlève tous les parasites, et après on est capable de savoir où il se trouve.
Comment se passe la compétition pour vous ?
On a du faire quelques améliorations comme diminuer l’intensité du signal émis par la balise, mais on a pu aussi augmenter notre vitesse car désormais nous gérons mieux l’évitement d’obstacles.
L’ambiance est super bonne, on rencontre plein de gens des autres IUT de France. C’est chouette ! En plus le classement provisoire nous est plutôt favorable. Nous sommes actuellement 6ème avec 56 points. La seconde équipe de l’IUT de Cherbourg (R2DUINO) est première au classement provisoire. On espère que l’on va se retrouver sur le match de la finale.
Merci à vous pour le temps que vous nous avez accordez, on ne vous retient pas plus longtemps. Bonne chance pour la suite.
Depuis l’interview l’équipe a pu participer aux derniers tours de qualification et avec 9 points supplémentaires elle confirme sa 6ème place. Vous pourrez la retrouver cet après-midi parmi les participants des phases finales. Bonne chance à eux.
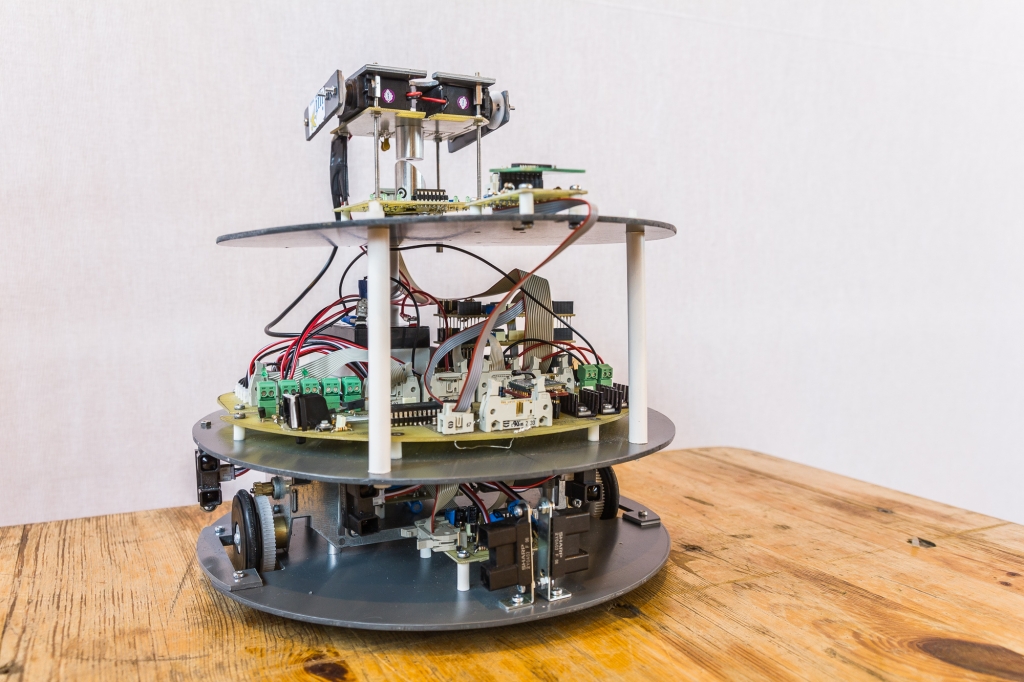
Le robot de l’équipe C3PO
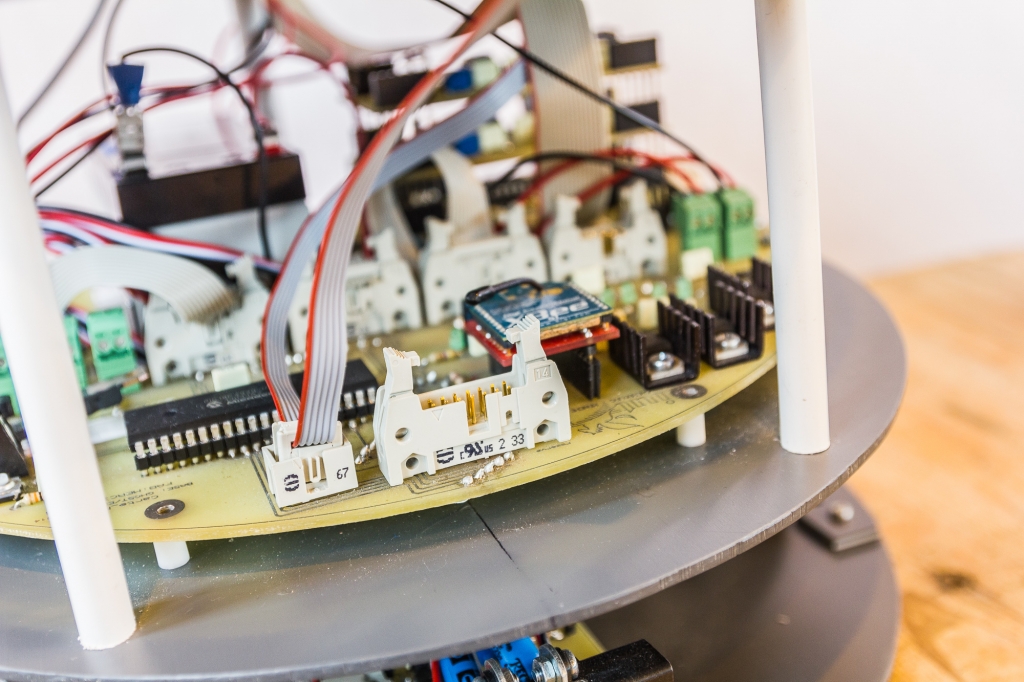
Ils font toute leur carte électronique eux-même et c’est plutôt propre
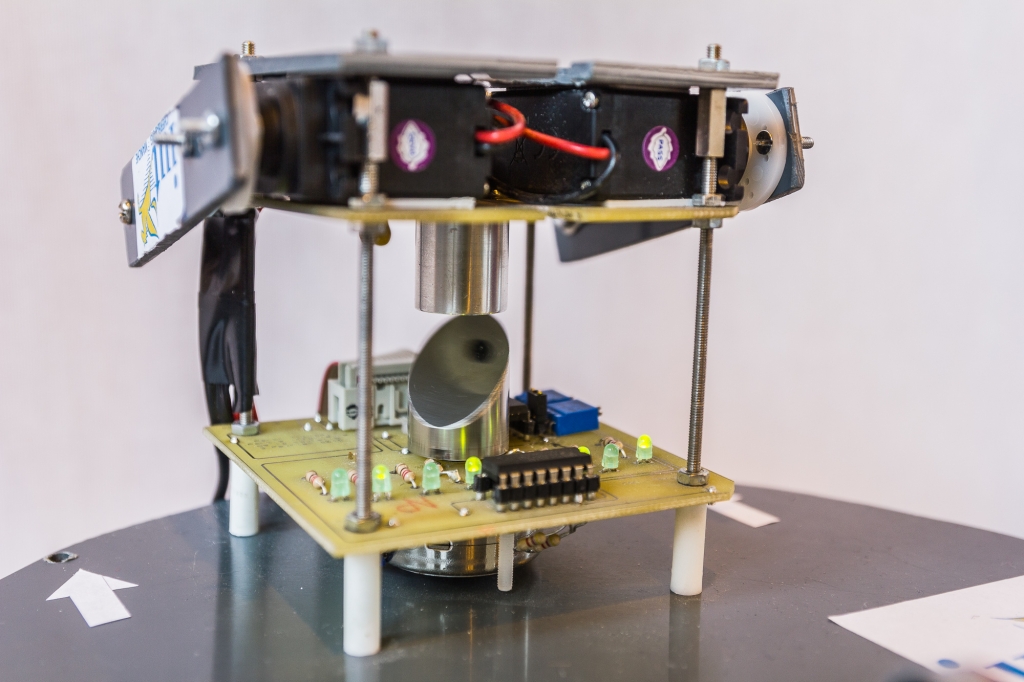
Une trourelle permet au robot de chercher le signal émis par une balise afin de s’orienter
Gogogogo cherbouuuuuurg